

Равномерное прямолинейное движение: скорость и уравнение движения
Путь и перемещение при равномерном прямолинейном движении
Прямолинейное равномерное движение уже рассматривалось в курсе физики ранее, однако приведем основные определения.
Прямолинейное движение – это движение по прямой линии. Равномерное движение – такое, в процессе которого тело за равные временные промежутки проходит один и тот же путь. Если объединить эти два определения получится третье:
равномерное прямолинейное движение – это такое движение, в ходе которого 1) тело совершает движение по прямой линии; 2) за одинаковые временные промежутки проходит одинаковый путь.
Зная определения пути и перемещения, это определение можно упростить: прямолинейное равномерное движение тела – это такое движение, в процессе которого тело за одинаковые временные промежутки совершает равные перемещения.
Важной характеристикой является скорость механического движения. Предположим, что при равномерном прямолинейном движении тело за промежуток времени △t перемещается из точки А в точку Б (см
рисунок 8). Радиус-вектор, проведенный в точку A обозначим r, а радиус-вектор в точку Б обозначим r1. Изменение радиус-вектора назовем △r – нетрудно заметить, что это есть перемещение тела за время △t.
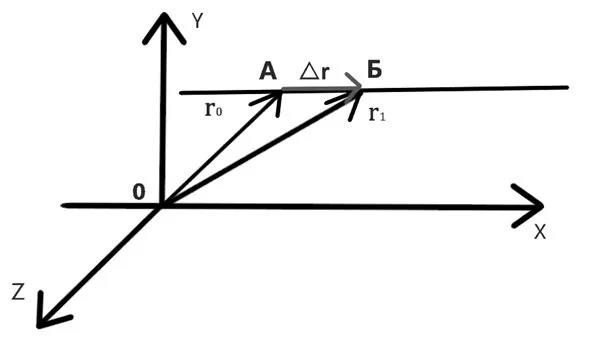
Рисунок 8 – Поиск перемещения тела через радиус-векторы при равномерном прямолинейном движении
Тогда скорость движения (v) будет вычисляться по формуле:
Так как △r – вектор, △t – скаляр, скорость v тоже будет вектором, сонаправленным перемещению.
Если тело начинает двигаться в момент начала отсчета, то △t = t*. Из правила сложения векторов следует, что △r = r1 — r. Тогда выражение для скорости можно переписать в виде:
Из этого выражения следует:
r1 = r + v*t.
Это выражение можно применить к любому произвольно взятому моменту времени, поэтому можно опустить индекс в левой части и переписать:
r= r + v*t.
Данное уравнение является уравнением движения при прямолинейном равномерном движении.
*Напоминание: символом △ (дельта) обозначают изменение какой-нибудь величины. Например △t = t – t1, где t – конечный момент времени, t1 – начальный. Если же начальный момент времени совпадает с началом отсчета t1 = 0, то △t = t – 0 = t.
Фактически уравнение равномерного прямолинейного движения означает, что радиус-вектор в произвольный момент времени t можно посчитать, сложив начальный радиус-вектор и приращение v*t.
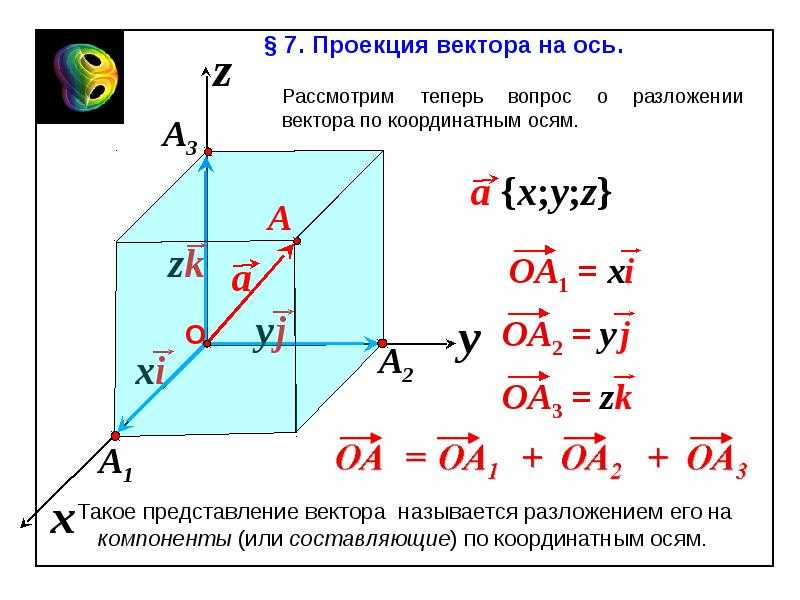
Найдя проекции радиус-вектора и вектора скорости, можно разложить уравнение движения тела на три составляющие вдоль осей ОX, ОY и ОZ.
rx = r0x + vx*t;
ry = r0y + vy*t;
rz = r0z + vz*t.
В этих выражениях r0x, r0y, r0z и vx, vy, vz– это компоненты изначальных векторов r и v вдоль осей ОХ, ОY и ОZ соответственно. И теперь можно перейти к скалярному виду:
rx = r0x + vx*t;
ry = r0y + vy*t;
rz = r0z + vz*t.
Стоит отметить, что при проецировании какие-то компоненты вектора могут стать отрицательными, тогда знаки в выражениях поменяются на противоположные.
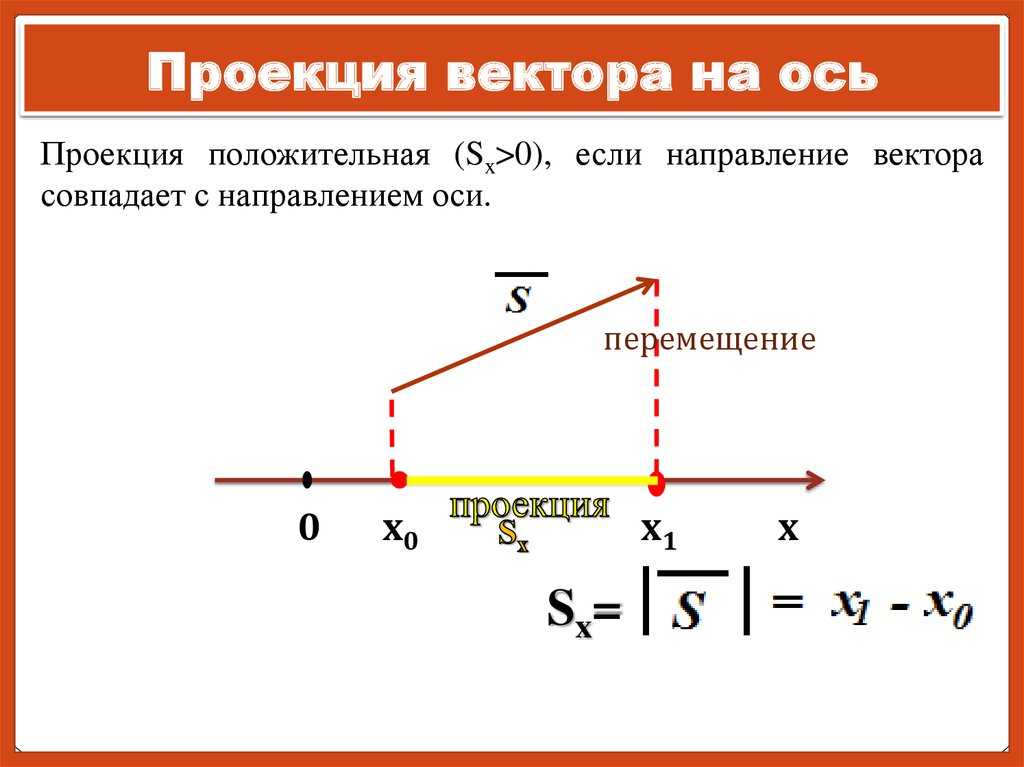
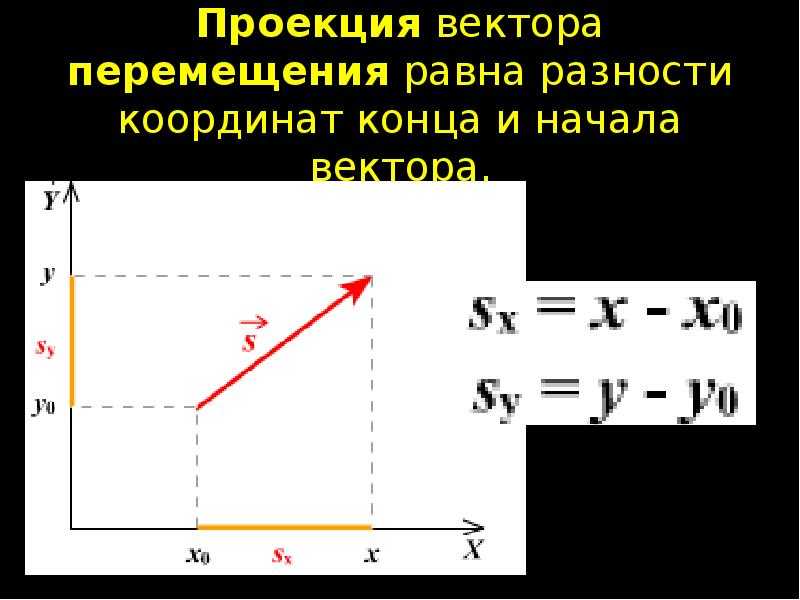
В рассмотренном выше примере движение происходит только вдоль оси ОХ (остальные координаты не изменяются). На рисунке 9 приведены проекции начальной (х) и конечной (х1) точки на ось ОХ.
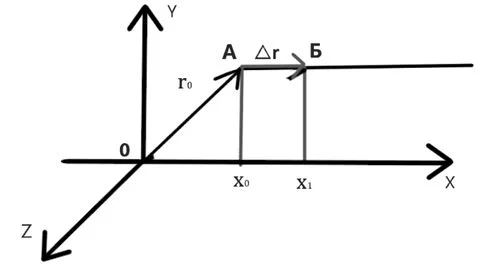 Рисунок 9 – Перемещение тела в координатном представлении
Рисунок 9 – Перемещение тела в координатном представлении
Уравнение координаты (х) движения будет выглядеть:
x(t) = x+ v*t.
А это уже похоже на знакомую из прошедшего курса физики формулу для нахождения пути:
S(t) = S + v*t.
Если точка начала двигаться из начала отсчета S = 0, можно переписать эту формулу в виде:
S(t) = v*t.
Отсюда следуют известные уже формулы для нахождения скорости и времени при равномерном прямолинейном движении:
Приведем последний в этой статье пример: известно, что тело движется вдоль оси ОХ, начиная из точки x = 3 см. Скорость тела равна v = 5 м/с и направлена вдоль оси ОХ. Необходимо записать уравнение движения по координате х для этого тела.
Итак, для начала приведем все единицы измерения к СИ:
x = 3 см = 0,03 м.
Теперь можно записывать уравнение для координаты х:
x(t) = x+ v*t = 0,03 + 5*t.
Из этого уравнения можно найти координату тела в любой момент времени. Например, через 2 секунды после начала отсчета тело находилось в точке:
x(2) = 0,03 + 5*2 = 10, 03.
А какой путь прошло тело к этому моменту? В начале оно находилось в точке x(2) = 0,03 м, а через 2 секунды оно стало находиться в точке x(2) = 10, 03. Значит за 2 секунды тело прошло:
S = x(2) – x = 10, 03 – 0,03 = 10 м.
А если скорость тела была направлена противоположно оси ОХ, как тогда выглядело бы уравнение движения?
Тогда проекция вектора скорости на ось ОХ была бы отрицательной и в уравнении знак перед скоростью поменялся бы на противоположный:
x(t) = x- v*t = 0,03 — 5*t.
Операции над векторами, заданными в координатной форме
Пусть даны два вектора и , заданные своими проекциями:
Укажем действия над этими векторами.
Наконец-то у меня добрались руки до обширной и долгожданной темы аналитической геометрии
. Сначала немного о данном разделе высшей математики…. Наверняка вам сейчас вспомнился курс школьной геометрии с многочисленными теоремами, их доказательствами, чертежами и т.д. Что скрывать, нелюбимый и часто малопонятный предмет для значительной доли учеников. Аналитическая геометрия, как ни странно, может показаться более интересной и доступной. Что означает прилагательное «аналитическая»? На ум сразу приходят два штампованных математических оборота: «графический метод решения» и «аналитический метод решения». Графический метод
, понятно, связан с построением графиков, чертежей. Аналитический
же метод
предполагает решение задач преимущественно
посредством алгебраических действий. В этой связи алгоритм решений практически всех задач аналитической геометрии прост и прозрачен, зачастую достаточно аккуратно применить нужные формулы – и ответ готов! Нет, конечно, совсем без чертежей тут не обойдется, к тому же для лучшего понимания материала я постараюсь приводить их сверх необходимости.
Открываемый курс уроков по геометрии не претендует на теоретическую полноту, он ориентирован на решение практических задач. Я включу в свои лекции только то, что с моей точки зрения, является важным в практическом плане. Если вам необходима более полная справка по какому-либо подразделу, рекомендую следующую вполне доступную литературу:
1) Вещь, с которой, без шуток, знакомо несколько поколений: Школьный учебник по геометрии
, авторы – Л.С. Атанасян и Компания
. Сия вешалка школьной раздевалки уже выдержала 20-ть (!) переизданий, что, конечно, не является пределом.
2) Геометрия в 2 томах
. Авторы Л.С. Атанасян, Базылев В.Т
. Это литература для высшей школы, вам потребуется первый том
. Из моего поля зрения могут выпадать редко встречающиеся задачи, и учебное пособие окажет неоценимую помощь.
Обе книги можно бесплатно закачать в Интернете. Кроме того, можете использовать мой архив с готовыми решениями, который можно найти на странице Скачать примеры по высшей математике
.
Из инструментальных средств предлагаю опять же собственную разработку – по аналитической геометрии, который значительно упростит жизнь и сэкономит массу времени.
Предполагается, что читатель знаком с базовыми геометрическими понятиями и фигурами: точка, прямая, плоскость, треугольник, параллелограмм, параллелепипед, куб и т.д. Желательно помнить некоторые теоремы, хотя бы теорему Пифагора, привет второгодникам)
Проекции векторов
Что такое проекция вектора и с чем ее едят?
Мы уже выяснили, что над векторами можно проводить множество операций. Здорово, когда можешь начертить векторы, достроить их до треугольника и измерить результат линейкой.
Но зачастую физика не дает нам легких цифр. Наша задача – не отчаиваться и быть умнее, упрощая себе задачи.
Для того, чтобы работать с векторами как с числами и не переживать об их положении и о точности рисунков, были придуманы проекции.
Проекция вектора – словно тень, которую он отбрасывает на ось координат. И эта тень может о многом рассказать.
Ось координат — прямая с указанными на ней направлением, началом отсчёта и выбранной единицей масштаба.
Осьможно выбрать произвольно. В зависимости от ее выбора можно либо значительно упростить решение задачи, либо сделать его очень сложным.
Именно поэтому необходимо научиться работать с проекциями и осями.
Матрица линейного преобразования в различных базисах
В начале статьи мы выяснили происхождение матрицы линейного преобразования на примере оператора и ортонормированного базиса . Напоминаю: для того, чтобы записать матрицу линейного оператора в каком-либо базисе, нужно строго по порядку подействовать этим оператором на базисные векторы и полученные координаты занести в столбцы матрицы (слева направо). В результате «обработки» векторов нами была составлена матрица данного линейного преобразования в данном базисе.
Но ведь на «школьном» базисе свет клином не сошёлся! Ничто нам не мешает перейти к произвольному базису , где это же линейное преобразование, скорее всего, выразится другой матрицей. Но сам-то оператор не изменится – он будет по-прежнему увеличивать векторы плоскости в 2 раза. Таким образом, справедливо следующее утверждение, которое по существу уже было озвучено ранее:
Одно и то же линейное преобразование в разных базисах в общем случае имеет РАЗНЫЕ матрицы.
И следующие две задачи как раз посвящены этому вопросу:
Пример 5
В базисе задано линейное преобразование . Найти матрицу данного преобразования в базисе , если
Решение: в условии задачи опять ничего не сказано о характере векторов, но для наглядности предположим, что данные базисы являются аффинным базисами плоскости. Как заметили внимательные читатели, предложенное линейное преобразование вытягивает все ненулевые объекты плоскости в направлении координатного вектора в 2 раза, и наша задача состоит в том, чтобы записать матрицу этого же преобразования в новом базисе . Для решения этого вопроса существует специальная формула:



![Math-public:proekciya-vectora [президентский фмл №239]](https://rwvt.ru/wp-content/uploads/e/9/8/e9874044541ac4dc7f38e86a5b8ba7c8.jpeg)
, где – матрица перехода от базиса к базису .
Составляется она просто: берём вектор и «укладываем» коэффициенты его разложения (внимание!) в 1-й столбец матрицы:. Затем рассматриваем вектор и заносим коэффициенты его разложения во 2-й столбец:
Внимание! Базисные векторы, в данном случае векторы , следует «перебирать» строго по порядку!
Остальное дело техники. Находим обратную матрицу:
Произведение:![]()
И, наконец, матрицу рассматриваемого линейного преобразования в новом базисе:![]()
Пользуясь ассоциативностью матричного умножения, можно было сначала найти , а затем , но, в общем-то, это уже несущественные детали.
Ответ:
Ещё раз повторим смысл задания: само линейное преобразование не поменялось – оно по-прежнему растягивает ненулевые объекты плоскости вдоль «старого» вектора в 2 раза и не деформирует их в направлении вектора , но в новом базисе матрица данного преобразования уже другая. И вы видите её в ответе.
Иногда матрицы и называют подобными.
Какой базис удобнее? Ну конечно, исходный , где матрица преобразования имеет вид , и сразу виднА характерная особенность этого преобразования. А что это за такой интересный базис, и как отыскать эту матрицу, вы узнаете на уроке о собственных векторах.
Трехмерный случай для самостоятельного решения:
Пример 6
Найти матрицу линейного преобразования в базисе , где , , , если она задана в базисе .
Пожалуйста, не путайте это задание с Примером № 3 – по первой оглядке здесь тоже какие-то похожие равенства, тоже штрихи, но смысл совершено другой. Если там шла речь о двух линейных преобразованиях и взаимосвязи координат векторов, то здесь – об одном и том же преобразовании и взаимосвязи векторов двух базисов.
Краткое решение и ответ совсем рядом.
И в завершении урока вернёмся к двумерному случаю и матрицам «два на два». Казалось бы, с геометрической точки зрения эти матрицы задают линейные преобразования плоскости и разговор закончен. Но на самом деле это не так – у матриц есть и другой геометрический смысл, с которым можно ознакомиться на уроке Переход к новому базису. Сначала я хотел включить пару соответствующих примеров в эту статью, но чуть позже решил, что материал будет уместнее опубликовать в разделе аналитической геометрии.
Ну и конечно, не забываем, что рассматриваемый материал касается не только геометрических векторов плоскости и пространства, но и вообще любых векторов.
Спасибо за внимание, жду вас на следующем, не менее увлекательном уроке о собственных числах и собственных векторах линейного преобразования. Решения и ответы:
Решения и ответы:
Пример 2: Решение: найдём матрицу обратного преобразования: (см. урок. Как найти обратную матрицу)Найдём прообразы: Ответ
Ответ
Пример 4: Решение: запишем матрицы преобразований:1) Последовательно применим к вектору преобразования и : 2) Найдём результирующее преобразование:
2) Найдём результирующее преобразование:![]() Таким образом:
Таким образом: Ответ: (нулевой вектор)
Ответ: (нулевой вектор)
Пример 6: Решение: Решение: Используем формулу . Запишем матрицу перехода к новому базису:Найдём матрицу обратного перехода:Вычислим:  Ответ
Ответ
(Переход на главную страницу)
Числовая проекция
Как мы уже знаем, результатом алгебраической проекции будет неотрицательное действительное число.
Определение 9
Числовой (алгебраической) проекцией на ось будем называть неотрицательное число, равное длине вектора геометрической проекции.
Рассмотрим это понятие на примере задачи:
Пример 2
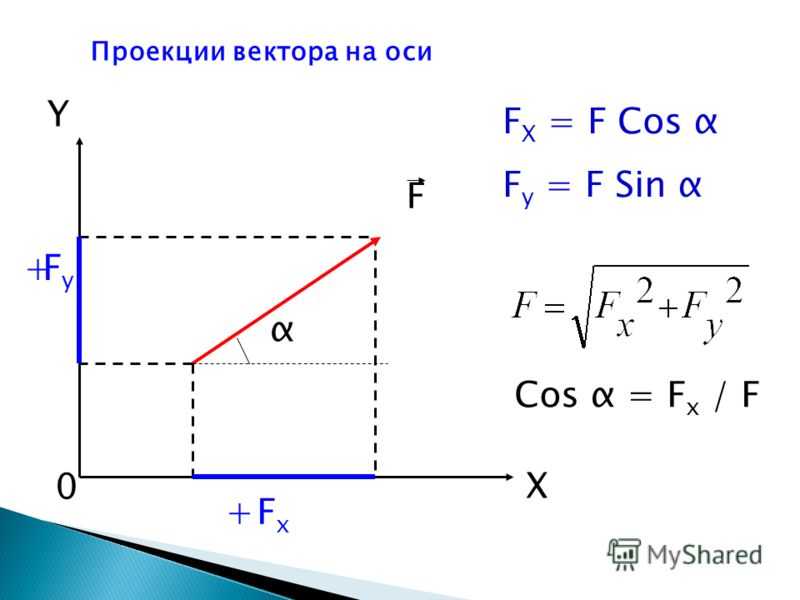
Найти числовую проекцию вектора $\overline{F} на сонаправленную ему ось $x$, если угол между ними равняется $α$ (рис. 8). (рис. 8).
Решение.
Введем на рисунке следующие обозначения:
Видим, что длина вектора геометрической проекции, равняется длине $XY$. Из определения косинуса получим, что
$XY=|\overline{F}|cosα$
где $|\overline{F}|$ — длина вектора $\overline{F}$. Это и будет искомая алгебраическая проекция на ось.
Другие случаи можете видеть на рисунке 9. 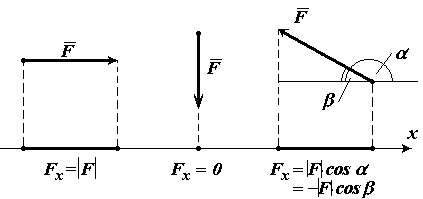
Получи деньги за свои студенческие работы
Курсовые, рефераты или другие работы
Свободное падение (ускорение свободного падения)
Свободное падение – это движение тела в безвоздушном пространстве под действием только силы тяжести.
Все тела при свободном падении независимо от массы падают с одинаковым ускорением, называемым ускорением свободного падения.
Ускорение свободного падения всегда направлено к центру Земли (вертикально вниз).
Обозначение – \( g \), единицы измерения – м/с2.
Важно! \( g \) = 9,8 м/с2, но при решении задач считается, что \( g \) = 10 м/с2
Движение тела по вертикали
Тело падает вниз, вектор скорости направлен в одну сторону с вектором ускорения свободного падения:

Если тело падает вниз без начальной скорости, то \( v_0 \) = 0.
Время падения рассчитывается по формуле:
![]()
Тело брошено вверх:

Если брошенное вверх тело достигло максимальной высоты, то \( v \) = 0.
Время подъема рассчитывается по формуле:
Движение тела, брошенного горизонтально
Движение тела, брошенного горизонтально, можно представить как суперпозицию двух движений:
- равномерного движения по горизонтали со скоростью \( v_0=v_{0x} \);
- равноускоренного движения по вертикали с ускорением свободного падения \( g \) и без начальной скорости \( v_{0y}=0 \).
Уравнение скорости:
Уравнение координаты:
![]()
Скорость тела в любой момент времени:
Дальность полета:
Угол между вектором скорости и осью ОХ:
Движение тела, брошенного под углом к горизонту (баллистическое движение)
Движение тела, брошенного под углом к горизонту, можно представить как суперпозицию двух движений:
- равномерного движения по горизонтали;
- равноускоренного движения по вертикали с ускорением свободного падения.
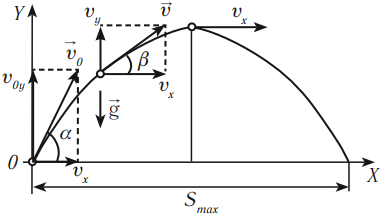
Уравнение скорости:
Уравнение координаты:
![]()
Скорость тела в любой момент времени:
Угол между вектором скорости и осью ОХ:
Время подъема на максимальную высоту:
Максимальная высота подъема:
Время полета:
Максимальная дальность полета:
Важно!
При движении вверх вертикальная составляющая скорости будет уменьшаться, т. е
тело вдоль вертикальной оси движется равнозамедленно.
При движении вниз вертикальная составляющая скорости будет увеличиваться, т. е. тело вдоль вертикальной оси движется равноускоренно.
Скорость \( v_0 \), с которой тело брошено с Земли, будет равна скорости, с которой оно упадет на Землю. Угол \( \alpha \), под которым тело брошено, будет равен углу, под которым оно упадет.





При решении задач на движение тела, брошенного под углом к горизонту, важно помнить, что в точке максимального подъема проекция скорости на ось ОУ равна нулю:
Это облегчает решение задач:
О направлении
Направление – одна из важнейших характеристик движения.
Подумай, какие из этих величин являются просто числами, а какие тоже являются числами, но имеют еще и направление.
- сила;
- время;
- скорость;
- длина;
- перемещение;
- масса;
- температура;
Наверное, ты без труда заметил, что направление имеют сила, скорость, перемещение, а время, длина, масса и температура – это просто числа.
Так вот, «просто числа» — это скалярные величины (их также называют скалярами).
А «числа с направлением» — это векторные величины (их иногда называют векторы).
В физике существует множество скалярных и векторных величин.
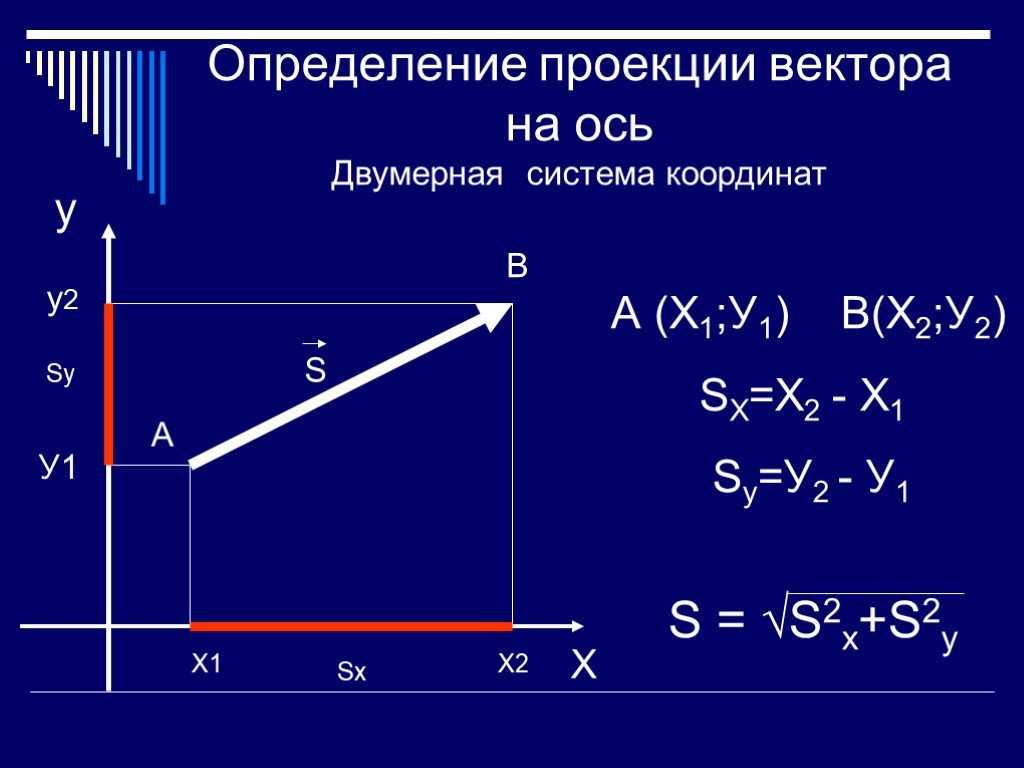
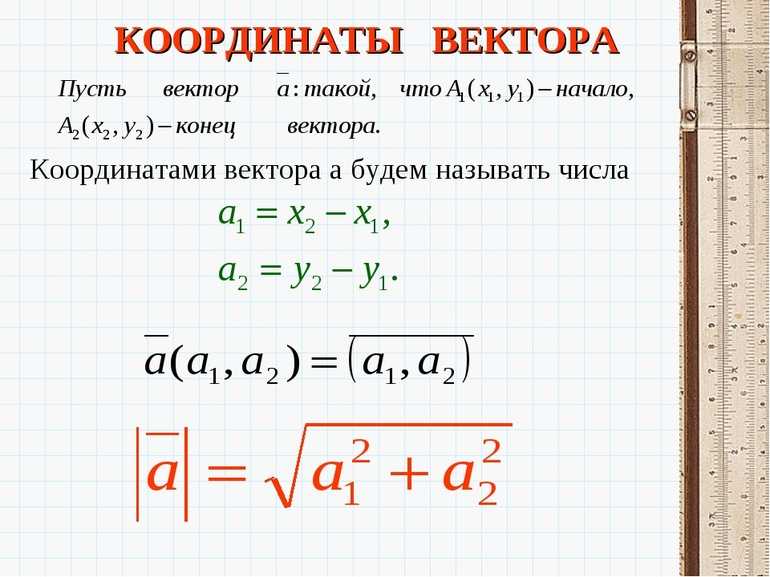
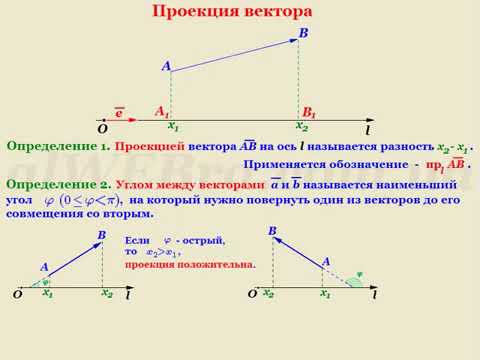
Теорема (о вычислении проекции вектора)
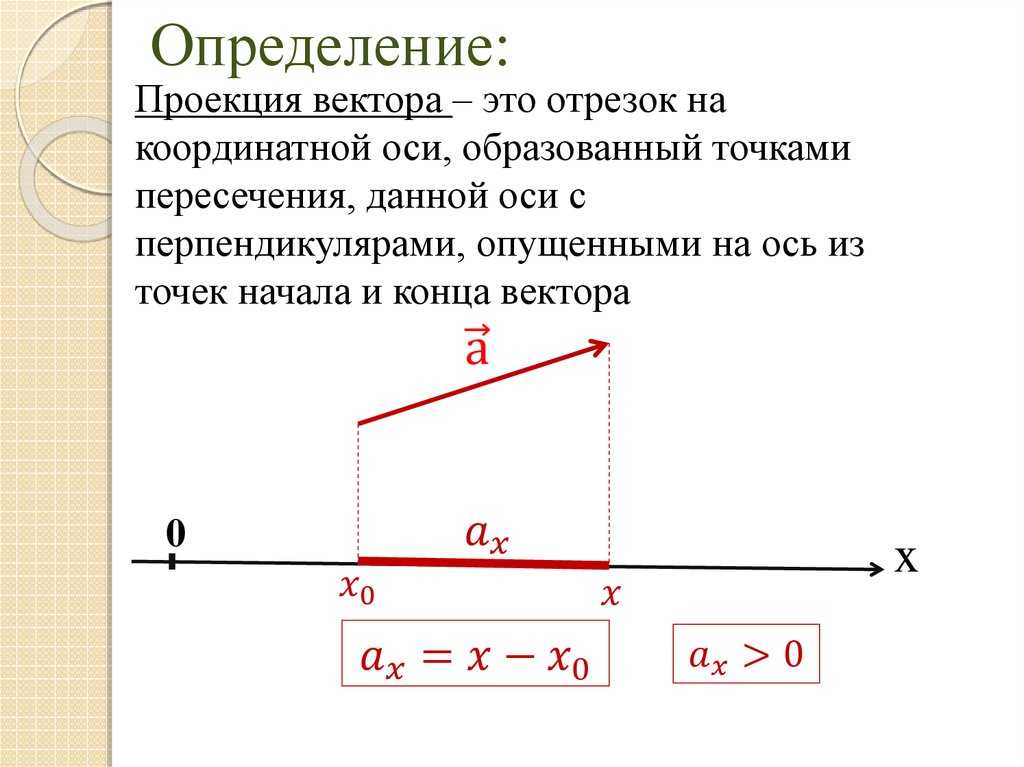
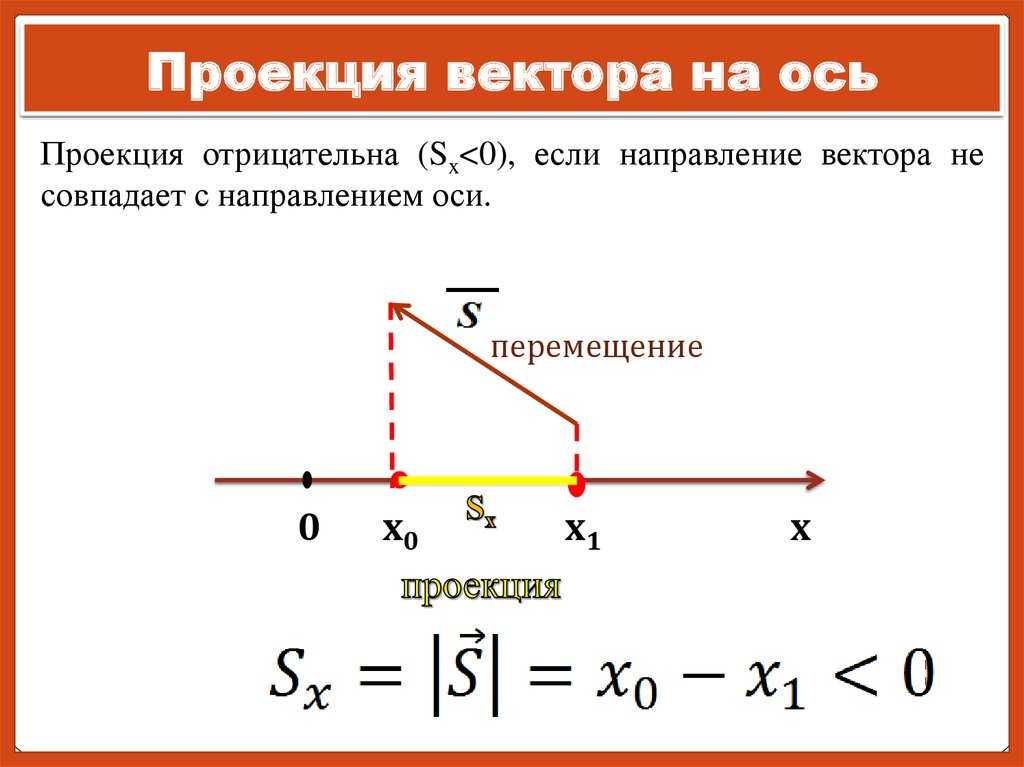
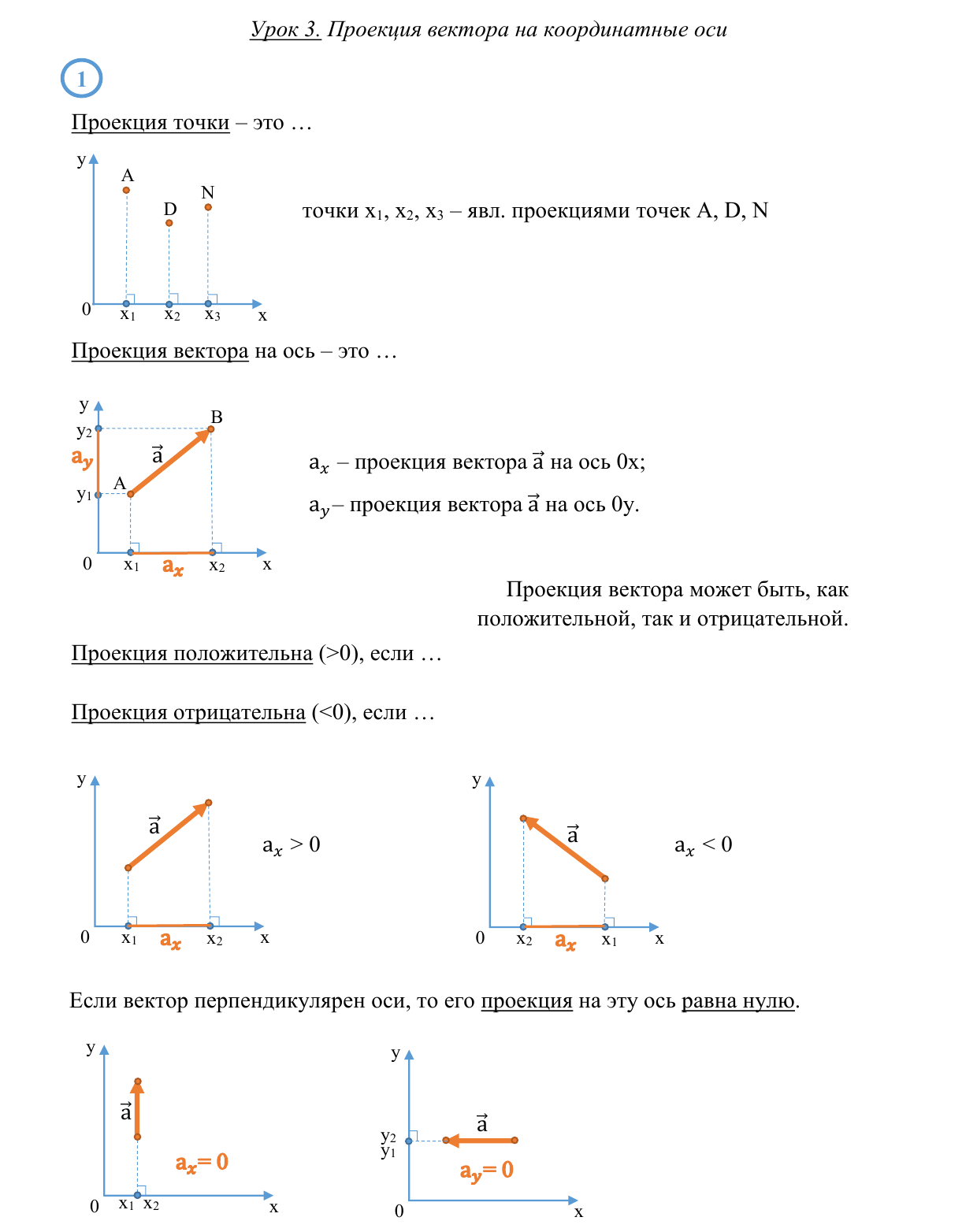
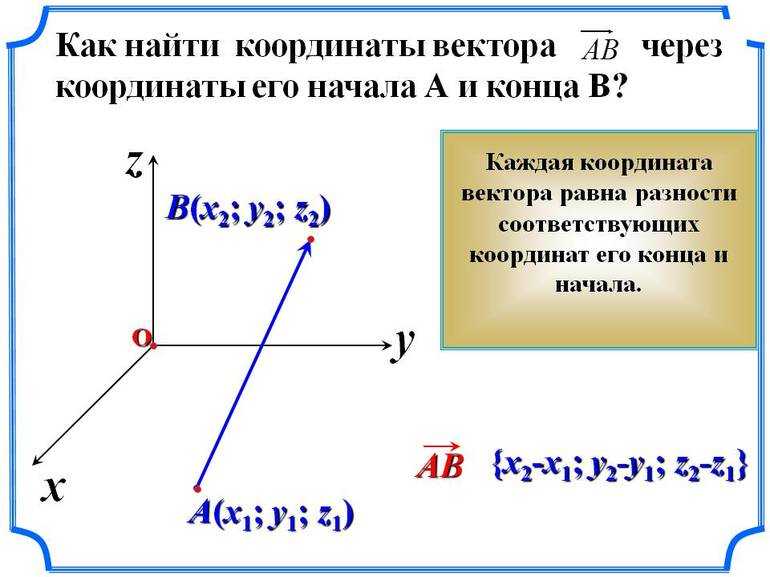
Проекция вектора $\vec{v}=\overrightarrow{AB}$ на ось $x$ равна $v_x=x_B-x_A$, где $x_A$ и $x_B$ – координаты проекций точек $A$ и $B$ на ось $x$.
Доказательство
Пусть проекциями точек $A$ и $B$ на ось $x$ являются точки $A_1$ и $B_1$ соответственно. ОбозначимИзвестно, что $|A_1B_1|=x_B-x_A$.
Если $\overrightarrow{A_1B_1}\neq\vec{0}$ и $\overrightarrow{A_1B_1}\upuparrows \vec{e}$, то $x_B>X_A$ и $x_B-x_A>0$. В этом случае $|x_B-x_A|=x_B-x_A$ и $v_x=|\overrightarrow{A_1B_1}|=x_B-x_A$.
Если $\overrightarrow{A_1B_1}\updownarrows \vec{e}$, то $x_B<x_A$ и $x_B-x_A<0$. В этом случае $|x_B-x_A|=-(x_B-x_A)$ и $v_x=-|\overrightarrow{A_1B_1}|=x_B-x_A$.
Если $\overrightarrow{A_1B_1}=\vec{0}$, то $v_x=0, A_1=B_1, x_B=x_A$ и снова $v_x=x_B-x_A$.
Итак, во всех случаях $v_x=x_B-x_A$.
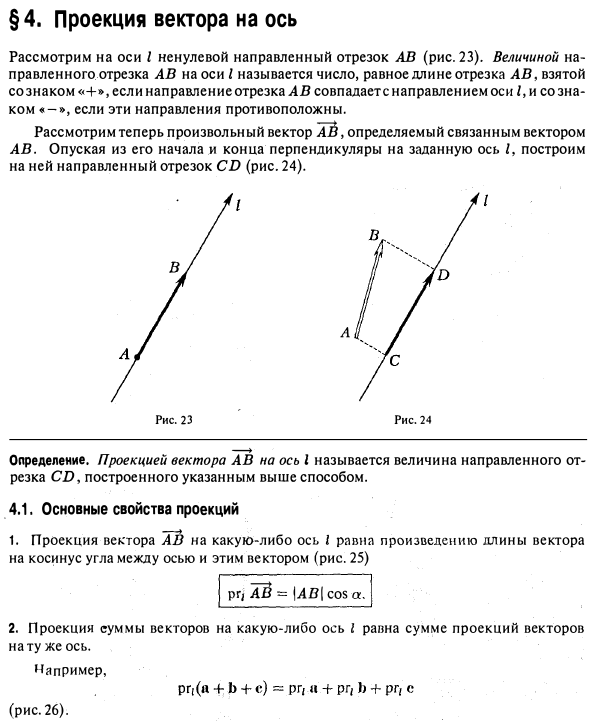
Углом между вектором и координатной осью называется угол между вектором и единичным вектором этой оси.
Понятие вектора. Свободный вектор
Сначала повторим школьное определение вектора. Вектором называется направленный отрезок, для которого указано его начало и конец:
В данном случае началом отрезка является точка , концом отрезка – точка . Сам вектор обозначен через . Направление имеет существенное значение, если переставить стрелку в другой конец отрезка, то получится вектор , и это уже совершенно другой вектор. Понятие вектора удобно отождествлять с движением физического тела: согласитесь, зайти в двери института или выйти из дверей института – это совершенно разные вещи.
Отдельные точки плоскости, пространства удобно считать так называемым нулевым вектором . У такого вектора конец и начало совпадают.
!!! Примечание: Здесь и далее можете считать, что векторы лежат в одной плоскости или можете считать, что они расположены в пространстве – суть излагаемого материала справедлива и для плоскости и для пространства.
Обозначения: Многие сразу обратили внимание на палочку без стрелочки в обозначении и сказали, там же вверху еще стрелку ставят! Верно, можно записать со стрелкой: , но допустима и запись , которую я буду использовать в дальнейшем. Почему? Видимо, такая привычка сложилась из практических соображений, слишком разнокалиберными и мохнатыми получались мои стрелки в школе и ВУЗе
В учебной литературе иногда вообще не заморачиваются клинописью, а выделяют буквы жирным шрифтом: , подразумевая тем самым, что это вектор.
То была стилистика, а сейчас о способах записи векторов:
1) Векторы можно записать двумя большими латинскими буквами: и так далее. При этом первая буква обязательно обозначает точку-начало вектора, а вторая буква – точку-конец вектора.
2) Векторы также записывают маленькими латинскими буквами: В частности, наш вектор можно для краткости переобозначить маленькой латинской буквой .
Длиной или модулем ненулевого вектора называется длина отрезка . Длина нулевого вектора равна нулю. Логично.
Длина вектора обозначается знаком модуля: ,
Как находить длину вектора мы узнаем (или повторим, для кого как) чуть позже.
То были элементарные сведения о векторе, знакомые всем школьникам. В аналитической же геометрии рассматривается так называемый свободный вектор.
Если совсем просто – вектор можно отложить от любой точки: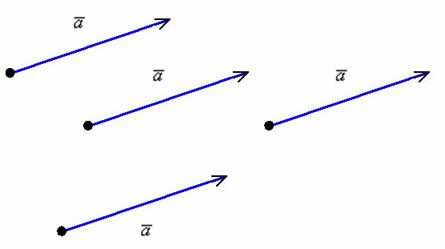
Такие векторы мы привыкли называть равными (определение равных векторов будет дано ниже), но чисто с математической точки зрения это ОДИН И ТОТ ЖЕ ВЕКТОР или свободный вектор. Почему свободный? Потому что в ходе решения задач вы можете «пристроить» тот или иной «школьный» вектор в ЛЮБУЮ, нужную вам точку плоскости или пространства. Это очень крутое свойство! Представьте направленный отрезок произвольной длины и направления – его можно «клонировать» бесконечное количество раз и в любой точке пространства, по сути, он существует ВЕЗДЕ. Есть такая студенческая присказка: Каждому лектору в ж**у по вектору. Ведь не просто остроумная рифма, всё почти корректно – направленный отрезок можно пристроить и туда. Но не спешите радоваться, чаще страдают сами студенты =)
Итак, свободный вектор – это множество одинаковых направленных отрезков. Школьное определение вектора, данное в начале параграфа: «Вектором называется направленный отрезок…», подразумевает конкретный направленный отрезок, взятый из данного множества, который привязан к определённой точке плоскости или пространства.
Следует отметить, что с точки зрения физики понятие свободного вектора в общем случае некорректно, и точка приложения имеет значение. Действительно, прямой удар одинаковой силы по носу или по лбу хватит развивать мой дурацкий пример влёчет разные последствия. Впрочем, несвободные векторы встречаются и в курсе вышмата (не ходите туда :)).
Далее, если не оговаривается иное, речь пойдёт только о свободных векторах.
Понятие вектора
Прежде чем Вы узнаете всё о векторах и операциях над ними, настройтесь на решение
несложной задачи. Есть вектор Вашей предприимчивости и вектор Ваших инновационных способностей. Вектор
предприимчивости ведёт Вас к Цели 1, а вектор инновационных способностей — к Цели 2. Правила игры
таковы, что Вы не можете двигаться сразу по направлениям двух этих векторов и достигнуть сразу двух целей.
Векторы взаимодействуют, или, если говорить математическим языком, над векторами производится некоторая
операция. Результатом этой операции становится вектор «Результат», который приводит Вас к Цели 3.
А теперь скажите: результатом какой операции над векторами «Предприимчивость» и
«Инновационные способности» является вектор «Результат»? Если не можете сказать сразу, не унывайте.
По мере изучения этого урока Вы сможете ответить на этот вопрос.
Как мы уже увидели выше, вектор обязательно идёт от некоторой точки A
по прямой к некоторой точке
B
. Следовательно, каждый вектор имеет не только числовое значение — длину, но также физическое и
геометрическое — направленность. Из этого выводится первое, самое простое определение вектора. Итак, вектор —
это направленный отрезок, идущий от точки A
к точке B
. Обозначается он так:
.
А чтобы приступить к различным операциям с векторами
, нам нужно познакомиться
с ещё одним определением вектора.
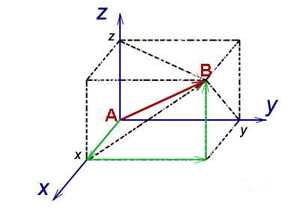
Вектор — это вид представления точки, до которой требуется добраться из некоторой начальной
точки. Например, трёхмерный вектор, как правило, записывается в виде
(х, y, z
)
. Говоря совсем
просто, эти числа означают, как далеко требуется пройти в трёх различных направлениях,
чтобы добраться до точки.
Пусть дан вектор. При этом
x
= 3
(правая рука указывает направо),
y
= 1
(левая рука указывает
вперёд),
z
= 5
(под точкой стоит лестница, ведущая вверх). По этим данным вы найдёте точку,
проходя 3 метра в направлении, указываемом правой рукой, затем 1 метр в направлении,
указываемом левой рукой, а далее Вас ждёт лестница и, поднимаясь на 5 метров, Вы, наконец,
окажетесь в конечной точке.
Все остальные термины — это уточнения представленного выше объяснения, необходимые для
различных операций над векторами, то есть, решения практических задач. Пройдёмся по этим
более строгим определениям, останавливаясь на типичных задачах на векторы.
Физическими примерами
векторных величин могут служить смещение материальной точки, двигающейся в пространстве,
скорость и ускорение этой точки, а также действующая на неё сила.
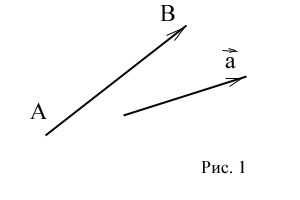
Геометрический вектор
представлен
в двумерном и трёхмерном пространстве в виде направленного отрезка
. Это отрезок, у которого различают начало
и конец.
Если A
— начало вектора, а B
— его конец, то вектор обозначается
символом или одной строчной буквой . На рисунке
конец вектора указывается стрелкой (рис. 1)
Длиной
(или модулем
) геометрического вектора
называется длина порождающего его отрезка
Два вектора называются равными
, если они могут быть совмещены (при совпадении направлений)
путём параллельного переноса, т.е. если они параллельны, направлены в одну и ту же сторону и имеют равные длины.
В физике часто рассматриваются закреплённые векторы
, заданные точкой приложения, длиной и направлением.
Если точка приложения вектора не имеет значения, то его можно переносить, сохраняя длину и направление в любую точку
пространства. В этом случае вектор называется свободным
. Мы договоримся рассматривать только свободные векторы
.
Механическое движение и его виды
Механическое движение — это изменение положения тела в пространстве относительно других тел с течением времени.
Механическое движение может быть:
1. по характеру движения
- поступательным — это движение, при котором все точки тела движутся одинаково и любая прямая, мысленно проведенная в теле, остается параллельна сама себе;
- вращательным — это движение, при котором все точки твердого тела движутся по окружностям, расположенным в параллельных плоскостях;
- колебательным — это движение, которое повторяется в двух взаимно противоположных направлениях;
2. по виду траектории
- прямолинейным — это движение, траектория которого прямая линия;
- криволинейным — это движение, траектория которого кривая линия;
3. по скорости
- равномерным — движение, при котором скорость тела с течением времени не изменяется;
- неравномерным — это движение, при котором скорость тела с течением времени изменяется;
4. по ускорению
- равноускоренным — это движение, при котором скорость тела увеличивается с течением времени на одну и ту же величину;
- равнозамедленным — это движение, при котором скорость тела уменьшается с течением времени на одну и ту же величину.
Общие сведения
Под термином «вектор» принято понимать прямую с определённым направлением, ограниченную начальной и конечной точкой. Фактически это отрезок, в котором известно, где его начало и конец. Обозначают его с помощью заглавных латинских букв и стрелочкой над ними. Например, если имеется вектор, берущий начало в точке A и заканчивающийся в B, то его подписывают как AB. Но также существует и короткое обозначение — одной малой буквой со стрелкой (чертой) над ней.
При работе с отрезками приходится сталкиваться с понятием «коллинеарность». Если векторы можно совместить параллельным переносом, и линии необязательно являются равными, то их называют коллинеарными. При этом их направление не имеет значения. Если же они совпадают по нему, то такие отрезки называют сонаправленными.
Тут следует учесть, что отрезки будут направлены в одну сторону лишь только тогда, когда их лучи находятся по одну сторону от прямой, объединяющей их начала. Когда векторы коллинеарны и не сонаправлены, то они противоположные. Осюда можно сформулировать правило, что два ненулевых вектора являются коллинеарными, если они располагаются на одной или на параллельных прямых. Причём точка считается коллинеарной любому отрезку.
При работе с отрезками можно выполнять различные арифметические операции на основании их свойств. Математические правила нахождения положения общего вектора называются линейными. Выделяют следующие действия над ограниченными прямыми:
- Суммирование — при сложении двух векторов образуется новый, если начальная точка совпадает с началом первого вектора, а конечная — с концом второго. Это правило работает при условии, что складываемые вектора имеют общую точку.
- Вычитание — для нахождения разности нужно соединить конечные точки двух отрезков. Эта новая линия и будет являться вектором разности. Для выполнения этого правила необходимо, чтобы отрезки выходили из одной точки.
- Умножение — существует три вида произведения векторов: скалярное, векторное и смешанное. Для первого и третьего вида в ответе получится число, а второго — вектор.
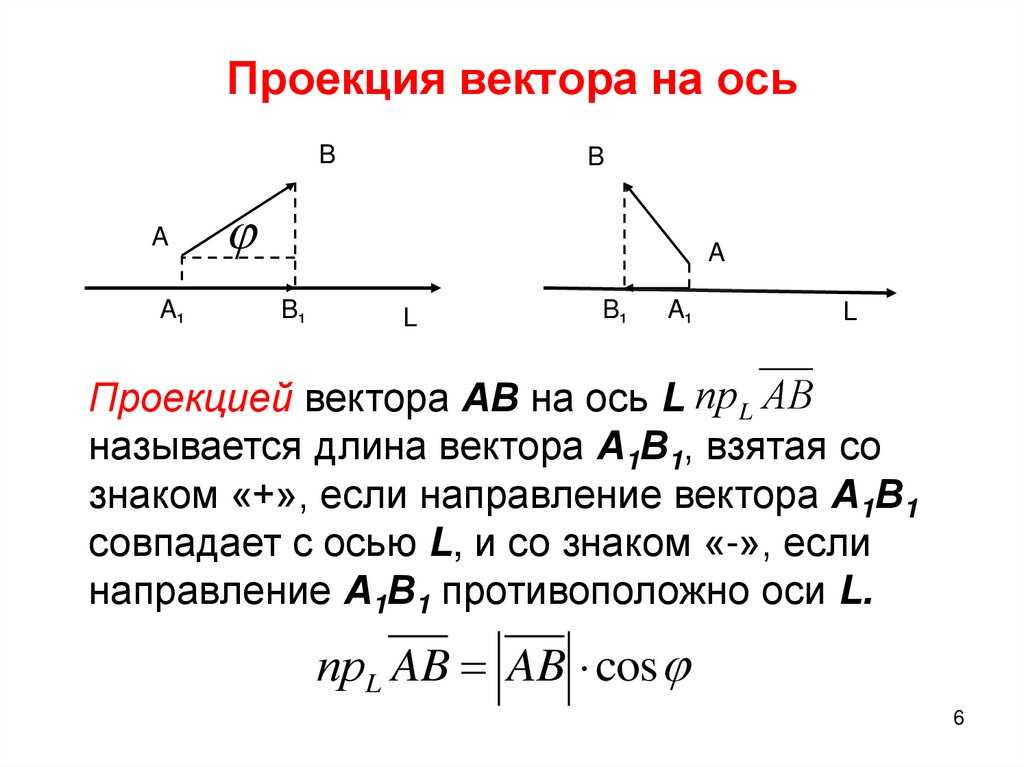
Числовая проекция вектора на ось
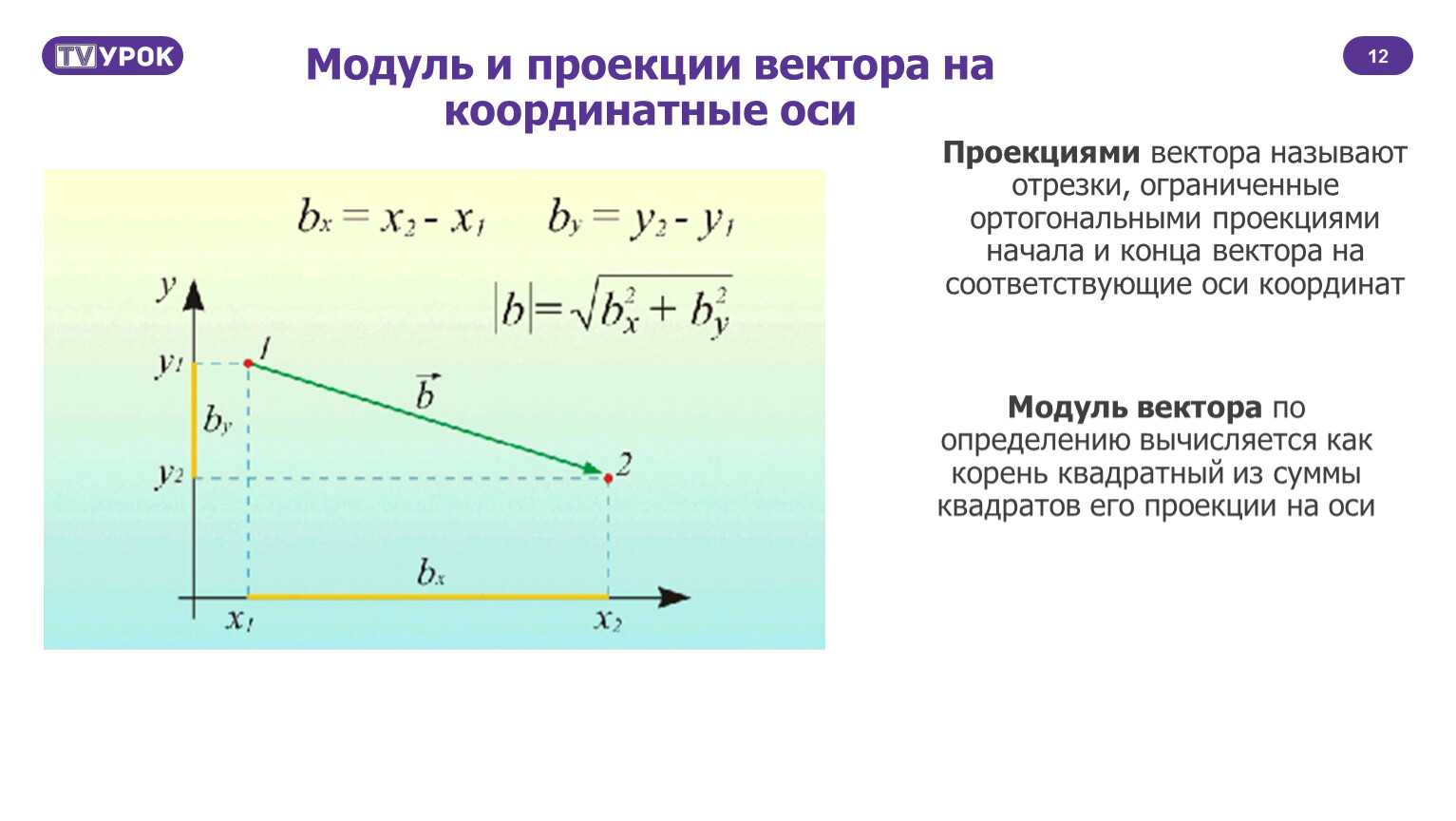
Числовая характеристика проекции вектора на ось – числовая проекция вектора на заданную ось.
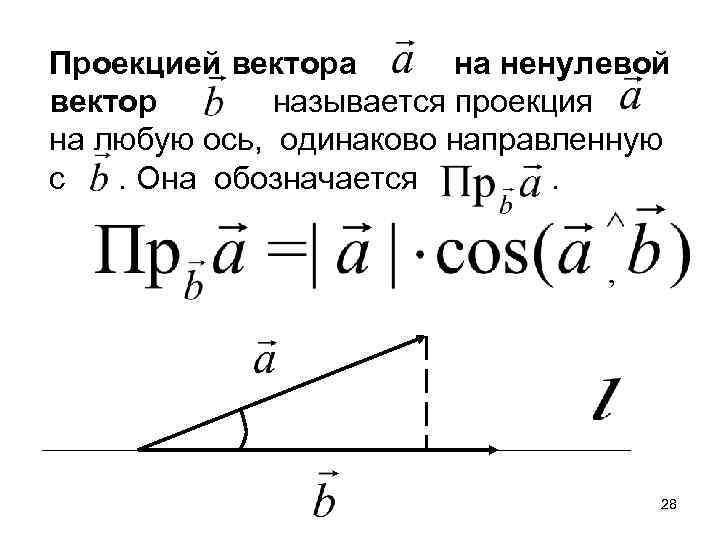
Числовой проекцией вектора на ось называют число, которое равно произведению длины данного вектора на косинус угла между данным вектором и вектором, который определяет направление оси.
Числовая проекция A B → на L имеет обозначение n p L A B → , а a → на b → — n p b → a → .
Исходя из формулы, получим n p b → a → = a → · cos a → , b → ^ , откуда a → является длиной вектора a → , a ⇀ , b → ^ — угол между векторами a → и b → .
Получим формулу вычисления числовой проекции: n p b → a → = a → · cos a → , b → ^ . Она применима при известных длинах a → и b → и угле между ними. Формула применима при известных координатах a → и b → , но имеется ее упрощенный вид.
Узнать числовую проекцию a → на прямую по направлению b → при длине a → равной 8 и углом между ними в 60 градусов. По условию имеем a ⇀ = 8 , a ⇀ , b → ^ = 60 ° . Значит, подставляем числовые значения в формулу n p b ⇀ a → = a → · cos a → , b → ^ = 8 · cos 60 ° = 8 · 1 2 = 4 .
Ответ: 4.
При известном cos ( a → , b → ^ ) = a ⇀ , b → a → · b → , имеем a → , b → как скалярное произведение a → и b → . Следуя из формулы n p b → a → = a → · cos a ⇀ , b → ^ , мы можем найти числовую проекцию a → направленную по вектору b → и получим n p b → a → = a → , b → b → . Формула эквивалента определению, указанному в начале пункта.





Числовой проекцией вектора a → на ось , совпадающей по направлению с b → , называют отношение скалярного произведения векторов a → и b → к длине b → . Формула n p b → a → = a → , b → b → применима для нахождения числовой проекции a → на прямую, совпадающую по направлению с b → , при известных a → и b → координатах.
Задан b → = ( — 3 , 4 ) . Найти числовую проекцию a → = ( 1 , 7 ) на L .
Решение
На координатной плоскости n p b → a → = a → , b → b → имеет вид n p b → a → = a → , b → b → = a x · b x + a y · b y b x 2 + b y 2 , при a → = ( a x , a y ) и b → = b x , b y . Чтобы найти числовую проекцию вектора a → на ось L , нужно: n p L a → = n p b → a → = a → , b → b → = a x · b x + a y · b y b x 2 + b y 2 = 1 · ( — 3 ) + 7 · 4 ( — 3 ) 2 + 4 2 = 5 .
Ответ: 5.
Найти проекцию a → на L , совпадающей с направлением b → , где имеются a → = — 2 , 3 , 1 и b → = ( 3 , — 2 , 6 ) . Задано трехмерное пространство.
Решение
По заданным a → = a x , a y , a z и b → = b x , b y , b z вычислим скалярное произведение: a ⇀ , b → = a x · b x + a y · b y + a z · b z . Длину b → найдем по формуле b → = b x 2 + b y 2 + b z 2 . Отсюда следует, что формула определения числовой проекции a → будет: n p b → a ⇀ = a → , b → b → = a x · b x + a y · b y + a z · b z b x 2 + b y 2 + b z 2 .
Подставляем числовые значения: n p L a → = n p b → a → = ( — 2 ) · 3 + 3 · ( — 2 ) + 1 · 6 3 2 + ( — 2 ) 2 + 6 2 = — 6 49 = — 6 7 .
Просмотрим связь между a → на L и длиной проекции a → на L . Начертим ось L , добавив a → и b → из точки на L , после чего проведем перпендикулярную прямую с конца a → на L и проведем проекцию на L . Существуют 5 вариаций изображения:
Первый случай при a → = n p b → a → → означает a → = n p b → a → → , отсюда следует n p b → a → = a → · cos ( a , → b → ^ ) = a → · cos 0 ° = a → = n p b → a → → .
Второй случай подразумевает применение n p b → a → ⇀ = a → · cos a → , b → , значит, n p b → a → = a → · cos ( a → , b → ) ^ = n p b → a → → .
Третий случай объясняет, что при n p b → a → → = 0 → получаем n p b ⇀ a → = a → · cos ( a → , b → ^ ) = a → · cos 90 ° = 0 , тогда n p b → a → → = 0 и n p b → a → = 0 = n p b → a → → .
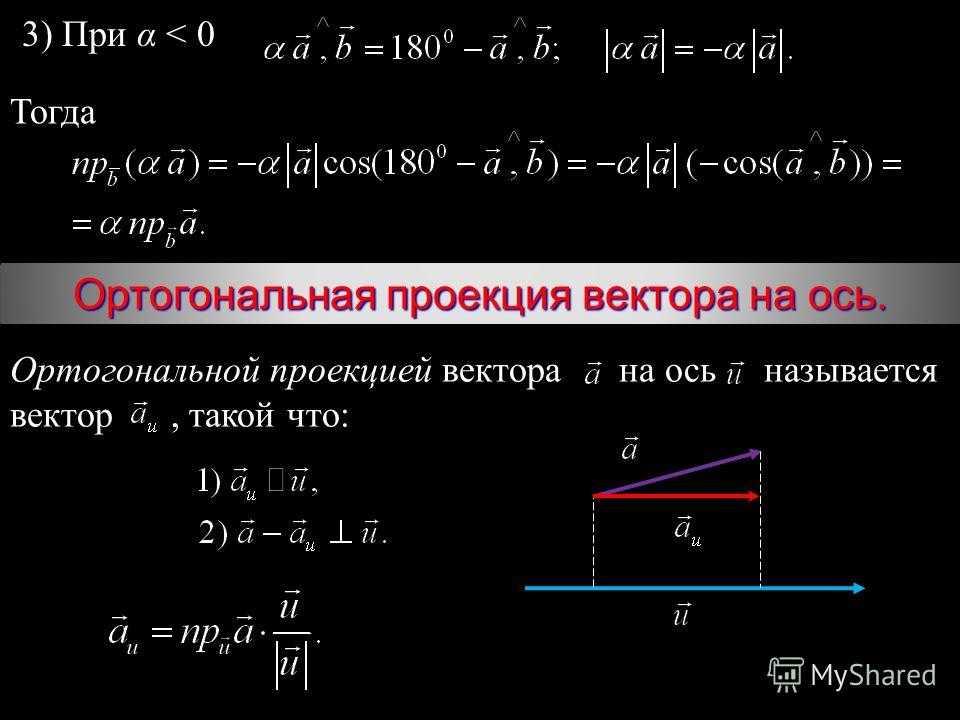
Четвертый случай показывает n p b → a → → = a → · cos ( 180 ° — a → , b → ^ ) = — a → · cos ( a → , b → ^ ) , следует n p b → a → = a → · cos ( a → , b → ^ ) = — n p b → a → → .
Пятый случай показывает a → = n p b → a → → , что означает a → = n p b → a → → , отсюда имеем n p b → a → = a → · cos a → , b → ^ = a → · cos 180 ° = — a → = — n p b → a → .
Числовой проекцией вектора a → на ось L , которая направлена как и b → , имеет значение:
- длины проекции вектора a → на L при условии, если угол между a → и b → меньше 90 градусов или равен 0: n p b → a → = n p b → a → → с условием 0 ≤ ( a → , b → ) ^ 90 ° ;
- ноля при условии перпендикулярности a → и b → : n p b → a → = 0 , когда ( a → , b → ^ ) = 90 ° ;
- длины проекции a → на L , умноженной на -1, когда имеется тупой или развернутый угол векторов a → и b → : n p b → a → = — n p b → a → → с условием 90 ° a → , b → ^ ≤ 180 ° .
Дана длина проекции a → на L , равная 2 . Найти числовую проекцию a → при условии, что угол равен 5 π 6 радиан.
Решение
Из условия видно, что данный угол является тупым: π 2 5 π 6 π . Тогда можем найти числовую проекцию a → на L : n p L a → = — n p L a → → = — 2 .
Дана плоскость О х y z с длиной вектора a → равной 6 3 , b → ( — 2 , 1 , 2 ) с углом в 30 градусов. Найти координаты проекции a → на ось L .
Решение
Для начала вычисляем числовую проекцию вектора a → : n p L a → = n p b → a → = a → · cos ( a → , b → ) ^ = 6 3 · cos 30 ° = 6 3 · 3 2 = 9 .
По условию угол острый, тогда числовая проекция a → = длине проекции вектора a → : n p L a → = n p L a → → = 9 . Данный случай показывает, что векторы n p L a → → и b → сонаправлены, значит имеется число t , при котором верно равенство: n p L a → → = t · b → . Отсюда видим, что n p L a → → = t · b → , значит можем найти значение параметра t : t = n p L a → → b → = 9 ( — 2 ) 2 + 1 2 + 2 2 = 9 9 = 3 .
Тогда n p L a → → = 3 · b → с координатами проекции вектора a → на ось L равны b → = ( — 2 , 1 , 2 ) , где необходимо умножить значения на 3. Имеем n p L a → → = ( — 6 , 3 , 6 ) . Ответ: ( — 6 , 3 , 6 ) .
Необходимо повторить ранее изученную информацию об условии коллинеарности векторов.
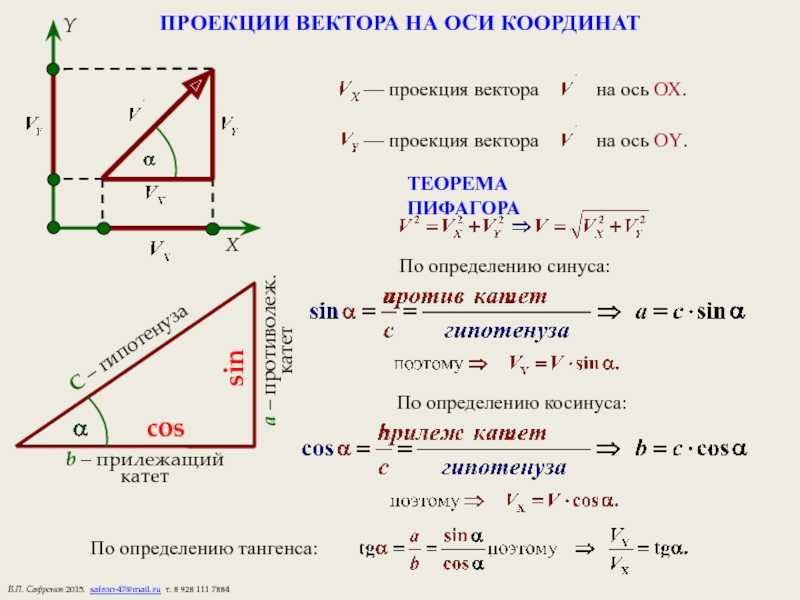
Скалярные и векторные величины
Многие физические величины полностью определяются заданием некоторого числа. Это, например, объем, масса, плотность, температура тела и др. Такие величины называются скалярными. В связи с этим числа иногда называют скалярами. Но есть и такие величины, которые определяются заданием не только числа, но и некоторого направления. Например, при движении тела следует указать не только скорость, с которой движется тело, но и направление движения. Точно так же, изучая действие какой-либо силы, необходимо указать не только значение этой силы, но и направление ее действия. Такие величины называются векторными. Для их описания было введено понятие вектора, оказавшееся полезным для математики.